
Il progetto di ricerca Autonomous all-terrain driving, nel quale Jaguar e Land Rover ha investito diversi milioni di sterline, mira a rendere possibile l’utilizzo di un veicolo autonomo nella più ampia gamma di situazioni reali, su ogni terreno e con qualsiasi condizione atmosferica.
Tony Harper, Head of Research di Jaguar e Land Rover, dichiara: “La nostra ricerca sulla guida autonoma all-terrain non si concentra solo su un veicolo autonomo su autostrada o nell’off-road estremo. Noi intendiamo rendere il viaggio più sicuro su qualsiasi terreno e in ogni situazione, sia per il veicolo a guida autonoma sia per quello guidato tradizionalmente.
“Non vogliamo limitare all’asfalto i futuri veicoli autonomi ed altamente automatizzati. Quando l’auto lascia la strada asfaltata, tali dispositivi di assistenza devono pertanto continuare ad essere operativi. In futuro, se all’inizio di un viaggio in autostrada si potrà godere dei vantaggi di un sistema autonomo del controllo di corsia, vogliamo che il sistema possa essere impiegato fino a destinazione, che si tratti anche di un sentiero sconnesso o in ghiaia.
“Così, anche se si percorrerà un tratto stradale in manutenzione con corsie delimitate da coni e doppio senso di marcia, una strada innevata in montagna o un sentiero fangoso in un bosco, tutte queste capacità avanzate saranno disponibili sia per il veicolo autonomo sia per il conducente, il quale potrà affidare al sistema il controllo del mezzo in caso non si senta sicuro di affrontare un ostacolo o un percorso accidentato. Siamo già leader mondiali nelle tecnologie all-terrain e questo progetto di ricerca incrementerà ulteriormente la nostra leadership.”
Per ottenere questi livelli di capacità autonome all-terrain, i ricercatori di Jaguar e Land Rover si sono concentrati sullo sviluppo delle tecnologie dei sensori, che costituiranno gli occhi dei futuri veicoli autonomi. Poiché i sensori sono sempre attivi, ed i loro livelli di percezione sono migliori di quelli del guidatore, il sistema sarà in grado di garantire al veicolo tutta l’intelligenza artificiale necessaria per pianificare la rotta da seguire, su qualsiasi superficie.
La ricerca SURFACE IDENTIFICATION AND 3D PATH SENSING combina videocamere, sensori di ultrasuoni, radar e LIDAR per garantire al veicolo una visione a 360° del mondo esterno. Tali sensori sono così avanzati da poter determinare le caratteristiche di una superficie, non più ampia di un pneumatico, anche sotto la neve o la pioggia, per pianificare il percorso.
Tony Harper aggiunge: “La chiave della guida autonoma su ogni terreno risiede nel dotare il veicolo dell’abilità di rilevare e predire il tracciato in 3D del percorso che sta per affrontare. Ciò vuol dire scansionare ed analizzare sia la superficie sulla quale si passerà, sia ogni eventuale pericolo ai lati e al di sopra del percorso previsto. Compresi ostacoli come barre limitatrici di un parcheggio, radici degli alberi, rami sporgenti, massi, oltre alla tipologia ed alla topografia del terreno.”
I sensori di ultrasuoni possono identificare le condizioni del terreno scansionandolo anteriormente fino a cinque metri di distanza, cosicché il Terrain Response possa essere automaticamente regolato prima che il veicolo passi dall’asfalto alla neve, o dall’erba alla sabbia. Ciò ottimizzerà le prestazioni all-terrain senza rallentamenti e mantenendo un pieno controllo del veicolo.
Per completare il percorso in 3D è necessario inoltre poter identificare eventuali rami sporgenti, o le barre limitatrici di altezza di un parcheggio, per stabilire se la rotta prescelta è sicura. L’Overhead Clearance ASSIST impiega una videocamera stereo che rileva eventuali ostacoli sospesi. Il guidatore immette nel sistema l’altezza del veicolo, che può comprendere portapacchi da tetto, o portabici, e il veicolo lo avvertirà con un semplice messaggio sul touchscreen se l’altezza non è sufficiente per il passaggio.
I sensori potrebbero anche essere impiegati per scansionare le asperità del terreno o della strada, regolando di conseguenza la velocità del veicolo. Il sistema TERRAIN-BASED SPEED ADAPTION (TBSA) fa uso di videocamere per rilevare una superficie accidentata, comprese superfici ondulate o irregolari, strade con effetto washboarding, buche e pozzanghere. Diventa inoltre semplice predire quale sarà l’impatto potenziale di queste superfici sulla marcia del veicolo, regolando automaticamente la velocità per ottimizzare il comfort dei passeggeri.
Un altro elemento chiave per il successo della guida autonoma all-terrain è la capacità del veicolo di comunicare con altri mezzi in circolazione, specie se nascosti da una curva o dall’altro lato di un ostacolo in off-road.
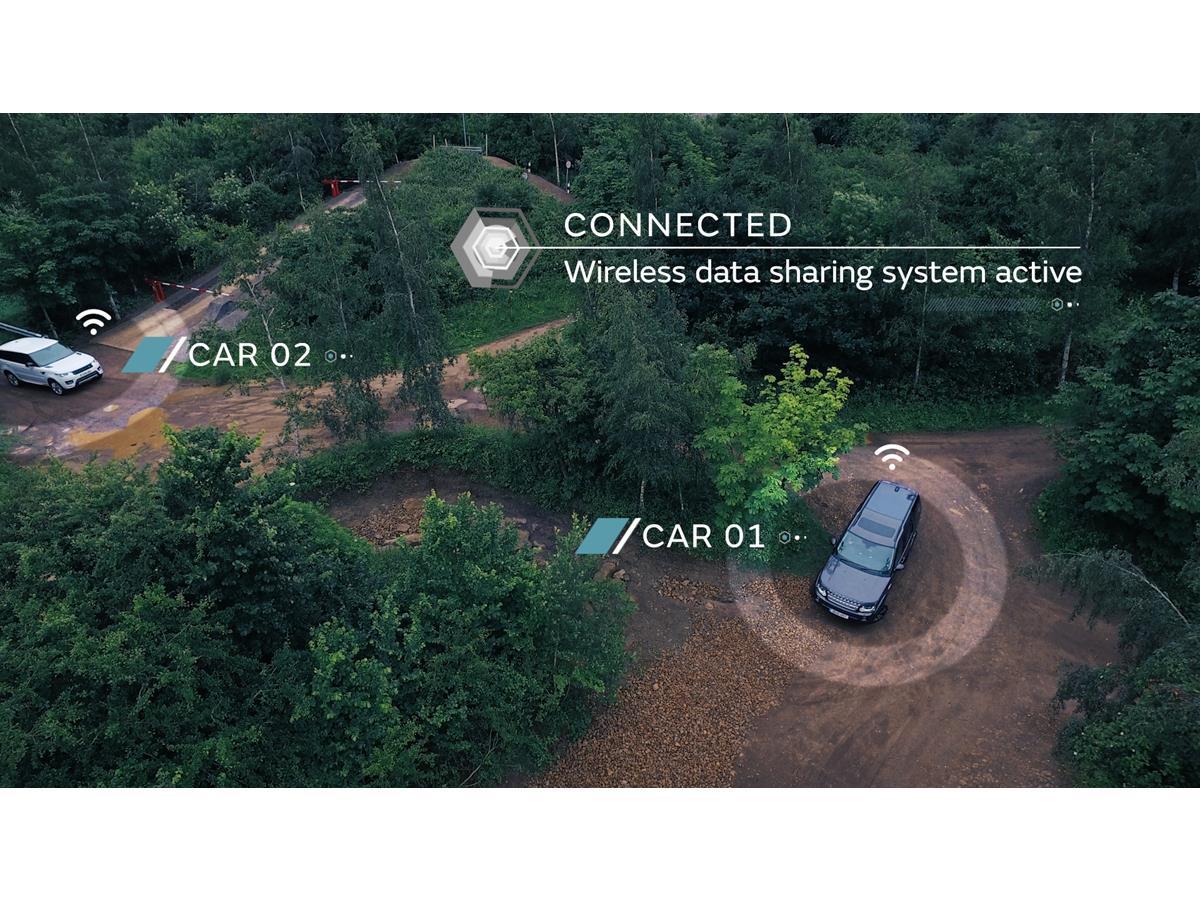
Durante la prima dimostrazione mondiale in off-road, Jaguar e Land Rover ha connesso due Range Rover Sport tramite l’innovativa tecnologia DSRC (Dedicated Short Range Communications) creando un Off-Road Connected Convoy. Il sistema di comunicazioni wireless veicolo-veicolo (V2V) condivide istantaneamente fra i due veicoli le informazioni, inclusa la posizione, la trazione, le variazioni di altezza delle sospensioni e l’articolazione delle ruote, l’All-Terrain Progress Control (ATPC) e le regolazioni del Terrain Response.
Dichiara Tony Harper: “Questo sistema di comunicazione V2V può connettere senza soluzione di continuità un convoglio di veicoli in fuoristrada. Se un veicolo si ferma, gli altri ne saranno allertati, se le ruote trovano una buca profonda o slittano su una roccia, questa informazione è condivisa con tutti. In futuro, un convoglio di veicoli autonomi potrebbe utilizzare queste informazioni per ottimizzare automaticamente le proprie regolazioni, o per cambiare percorso al fine di superare meglio un ostacolo.
“Ad esempio, durante un safari, il veicolo guida di un convoglio potrebbe far rallentare o fermare gli altri nel punto migliore per scattare le fotografie.”




Ho letto e acconsento l'informativa sulla privacy
Acconsento al trattamento di cui al punto 2 dell'informativa sulla privacy